

Projects
Flexible and real-time closed-loop feedback generation for fast voluntary behaviors
Pellentesque habitant morbi tristique senectus et netus et malesuada fames ac turpis egestas. Vestibulum tortor quam, feugiat vitae, ultricies eget, tempor sit amet, ante. Donec eu libero sit amet quam egestas semper. Aenean ultricies mi vitae est. Mauris placerat eleifend leo.
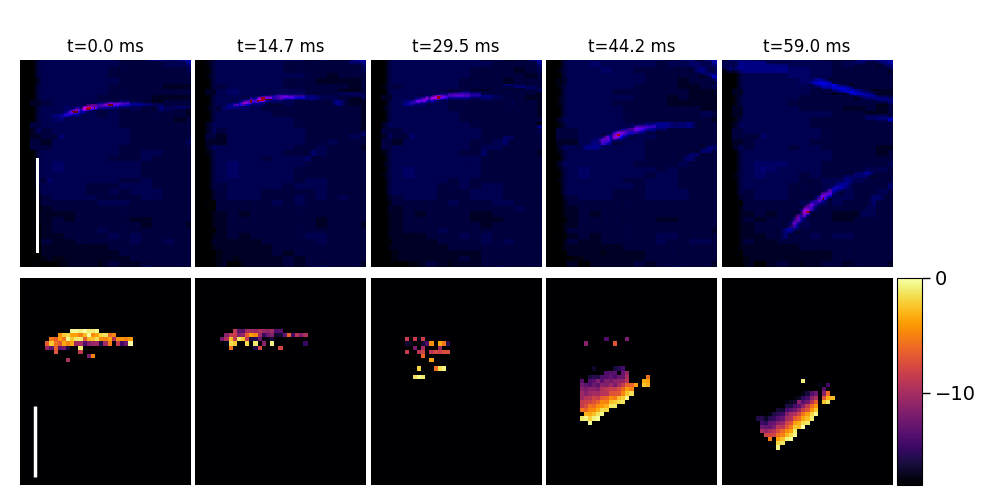
The neuromorphic camera can detect motion of the vibrissae. Different moments of the animal’s behavior during a representative recording session. For images deriving from a high-speed camera (top panels), single representative frames are shown. For images from a DVS camera (bottom panels), events that occurred within the ~20 ms period were integrated and displayed. Scale bars, 5 mm.
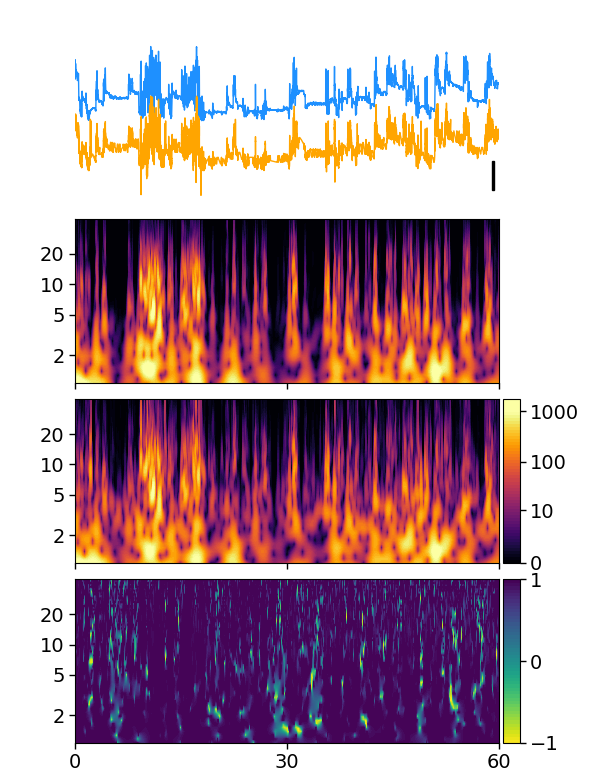
Real-time whisker tracking using the FastEvent system.
(A) Whisker-position was derived from a high-speed camera and the DVS neuromorphic camera. Top panel shows the 1 min whisker trace for the high-speed (blue) or the DVS camera (orange). Bottom panels show the wavelet (i.e. time-varying) power spectra generated from the two traces. The offline high speed camera and the neuromorphic camera tracked the whisker similarly, suggesting the Neuromorphic camera tracked whisker dynamics precisely in real-time.
(C) Statistics of the difference in phase for data acquired with the two cameras. Wavelet power spectra show the differences in power spectra of whisker postion measured by the high-speed camera and the DVS camera. On the y axis, “∆phase” indicates the phase difference of the whisker position for the DVS-based tracking relative to the high-speed camera-based tracking. The corresponding Fourier frequencies are plotted on the x axis. Histograms from 4 sessions (2 sessions each for 2 animals) were averaged. Majority of differences remained within a ±15-degree range up to 30 Hz.
Collaborators
Sehara et al.
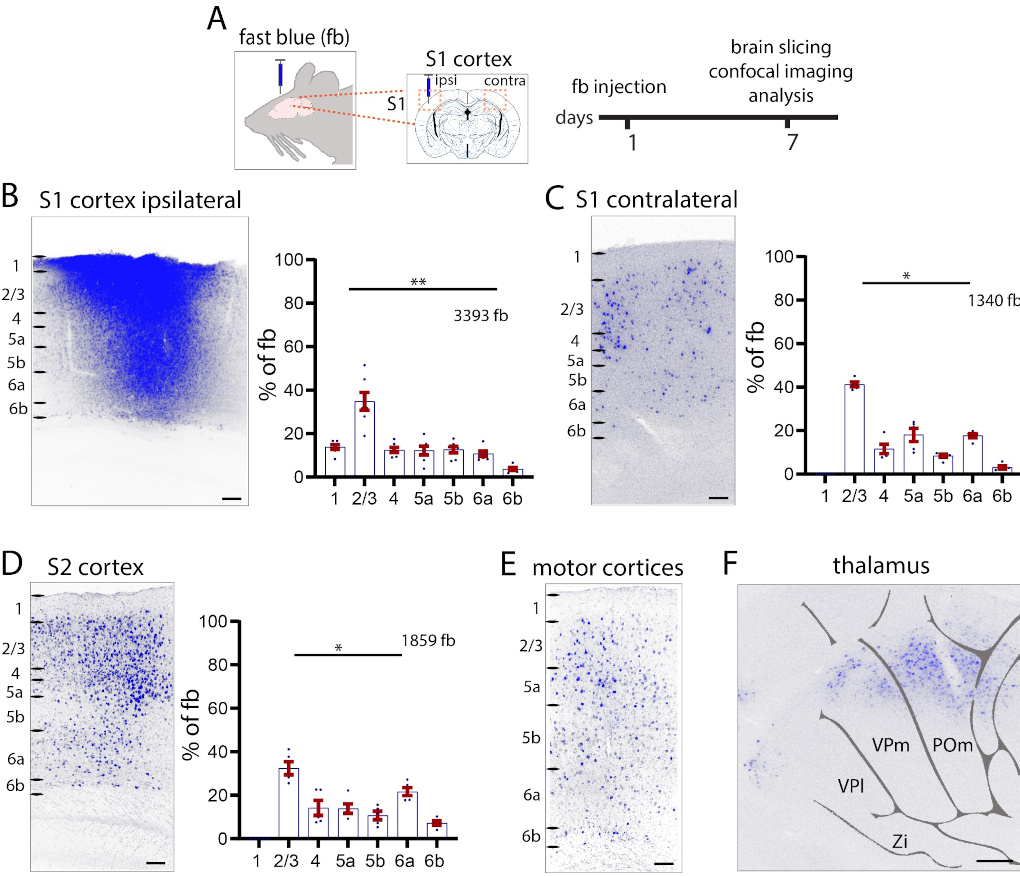
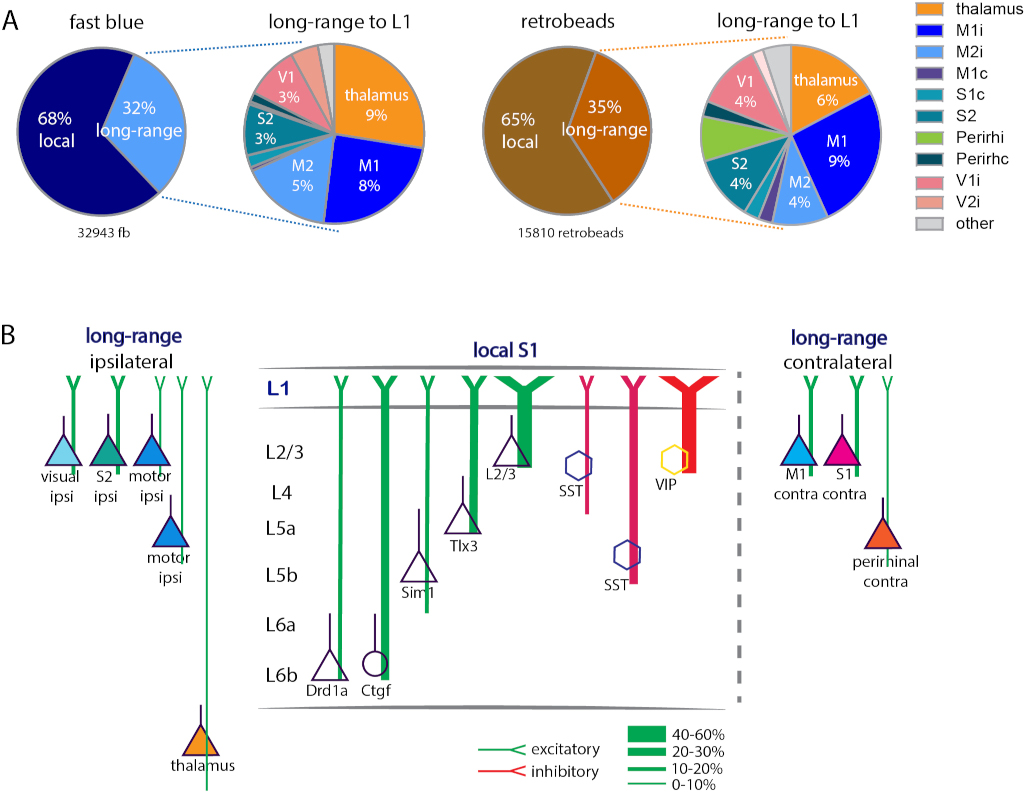
What projects to S1 cortex? Fast blue injected into cortex
Pellentesque habitant morbi tristique senectus et netus et malesuada fames ac turpis egestas. Vestibulum tortor quam, feugiat vitae, ultricies eget, tempor sit amet, ante. Donec eu libero sit amet quam egestas semper. Aenean ultricies mi vitae est. Mauris placerat eleifend leo.
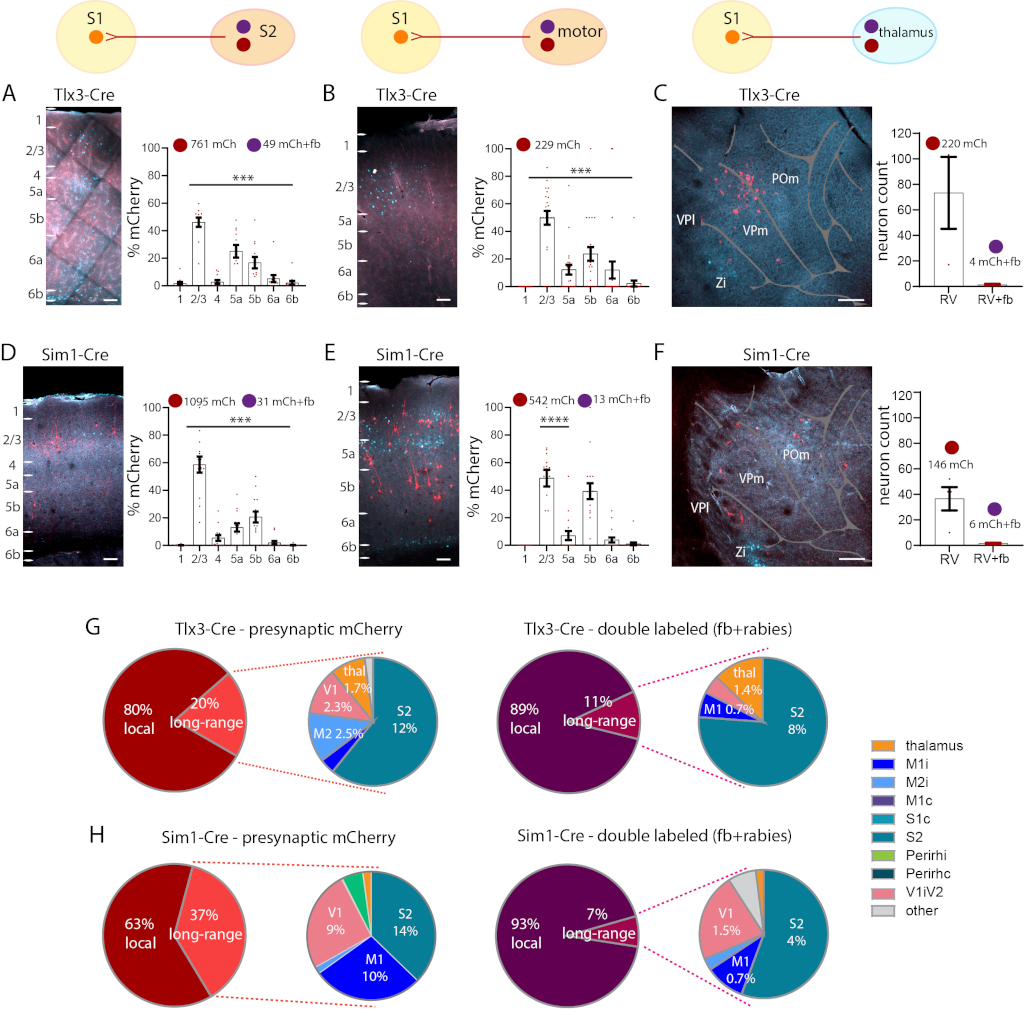
Take home message
- Layer 1 is like other cortical layers where most input is local feedback.
- Local input to L1 drives inhibitory interneurons.
- Long range input to S1 L1 arises primarily from M1, M2, S2 and visual cortices.
- Long range input to S1 L1 is predominantly from layer 2/3 neurons.
- Long range neurons that project to L1 do not project to deeper layers.
- Neurons projecting to S1 L1, are not presynaptic to IT or PT neurons.
Collaborators
Julia Ledderose, Tim Zolnik, Dieter Jaeger, Matthew Larkum